Hardware
Gebruikte hardware

Raspberry pi 4 model B 8GB RAM
Desondanks dat het basisrobotje perfect op enkel een Arduino geprogrammeerd kan worden, gebruik ik toch een Raspberry Pi. Dit om de simpele reden dat de robot uitgerust zal zijn met een camera dat onderdeel is van AI gestuurde Emotie herkenning. Omdat ik met AI ga werken komt er ook veel rekenkracht aan te pas. De Raspberry Pi 4 8GB is hiervoor dus beter geschikt dan een Arduin.
Datasheet
Raspberry Pi camera module 2
Voor het AI gedeelte van mijn GSP heb ik een camera nodig.
Ik gebruik deze camera omdat:
- Deze van hetzelfde merk is. (is dus gemaakt om op de Raspberry pi te werken)
- Programmeerbaar
- 60 fps op 720p

Arduino Nano
Omdat de Raspberry Pi niet zo geschikt is om servo motors aan te sturen via PWM, maak ik gebruik van een Arduino Nano. Niet enkel zal get de servo motors aansturen maar ook de ultrasone sensor en de infraroodsensoren. Dit omdat deze componenten nodig zijn bij het proces om het robotje te laten lopen.
Datasheet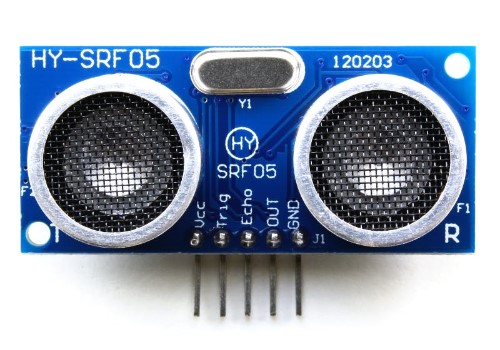
Ultrasonic sensor HY-SRF05
Om de robot objecten die voor hem staan te laten detecteren maak in gebruik van een ultrasone sensor.
Ik gebruik deze sensor omdat:
- Betrouwbaarheid: nauwkeurigheid van +/- 3 cm
- Frequentie van 40 kHz
- Energie-efficiëntie: laag stroomverbruik

Micro servo fs90 x4
Deze Motors hebben elk 3 pinnen:
- Rood: voor een voedingsspanning tussen 4,8V en 6V waarvan de Raspberry pi er 5V kan leveren.
- Bruin: voor de aarding(GND)
- Oranje: de signaaldraad, kan aangestuurd worden door de Raspberry pi.

Infrarood Sensors x2
Deze sensor kan worden gebruikt om te detecteren of er iets voor staat door te kijken naar de reflectie van infraroodstraling. Deze sensoren worden van voor in de voetjes van de robot geplaatst, ze wijzen naar onder. Als er gedetecteerd wordt dat de gemeten afstand te ver van het voetje is dan weet de robot dat hij niet eer verder mag stappen.
Datasheet
GME12864-41 OLED-module
Om de uitgelezen emotie weer te geven heb ik een klein schermpje nodig.
Ik gebruik dit schermpje omdat:
- Goede resolutie: 128 x 64 pixels
- Goede grote, diagonaal: 1,4 cm (0,96 inch)
- Verversingssnelheid: 60 Hz
- Aantal kleuren: 2, zwart en wit (meer heb ik niet nodig)
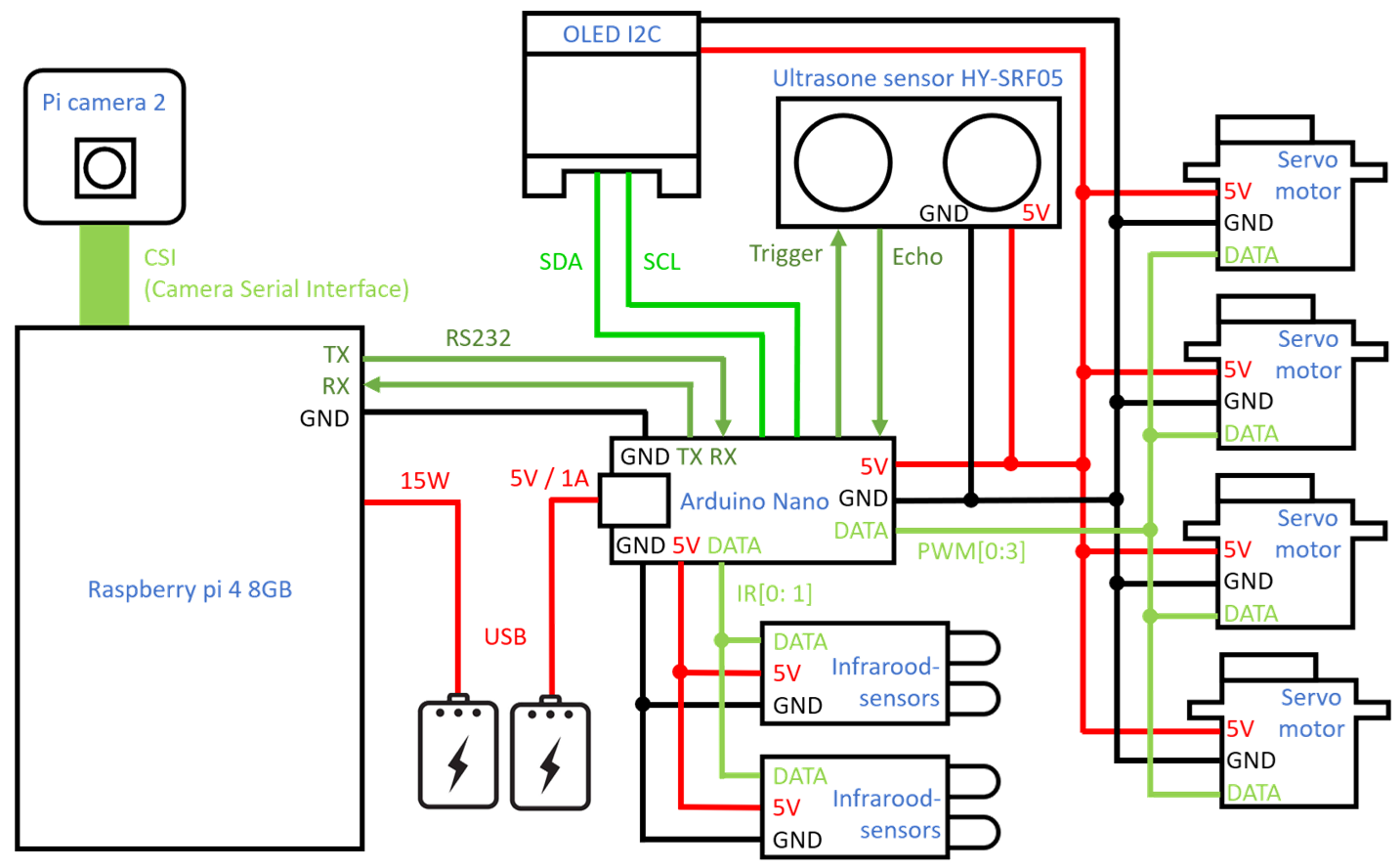
Blokschema Hardware