Software
Gebruikte software
Raspberry Pi Os
Als besturingssysteem voor de Raspberry Pi gebruik ik het basis Raspberry Pi operating system omdat:
- Deze is gemaakt door het Raspberry Pi bedrijf en zal dus goed werken op de Raspberry Pi.
- Het is gebruiksvriendelijk
- Er zijn veel online bronnen en ideeën
Python
Voor het programmeren van het AI-gedeelte gebruik ik de programmeertaal Python.
Python is namelijk ook een krachtige code die voor veel grote projecten wordt gebruikt.
Het is ook de basistaal op en Raspberry Pi.
Website
Arduino
Voor het programmeren van het loop proces van het robotje gebruik ik de programmeertaal van Arduino. Deze taal is een versie van C++.
De Arduino programmeertaal is namelijk een goed ondersteunde code. Vanuit Arduino zelf en de gemeenschap er rond. Hierdoor zijn er ook veel bibliotheken terug te vinden.
WebsiteDataflow
Flowcharts
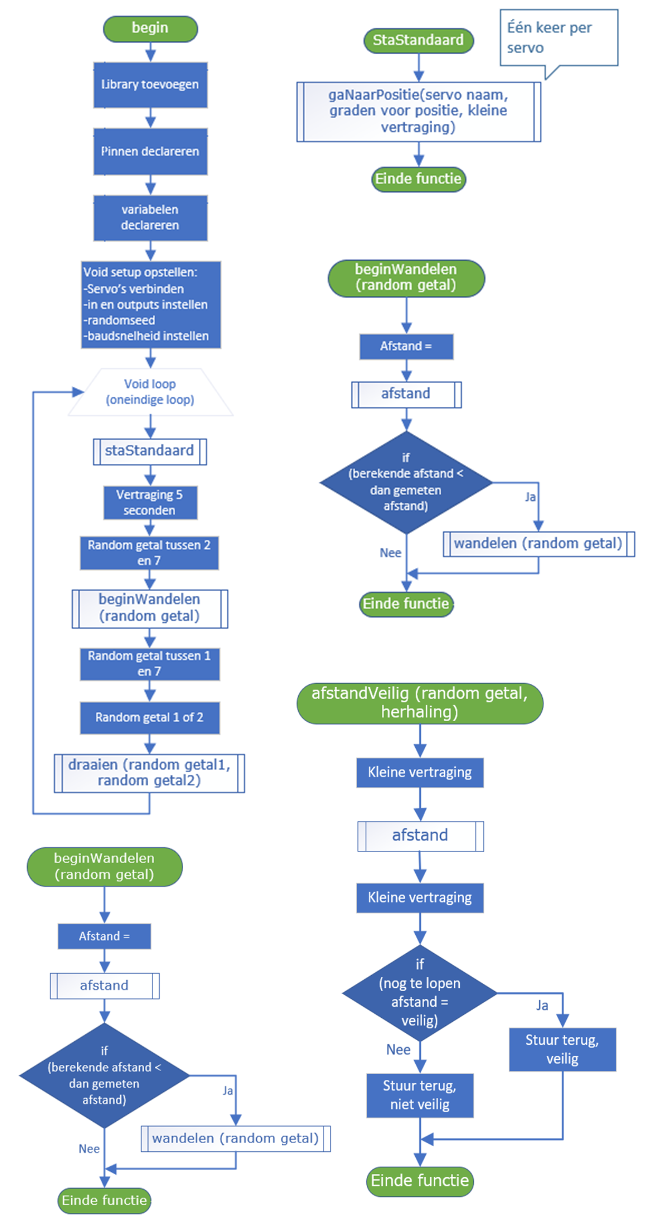
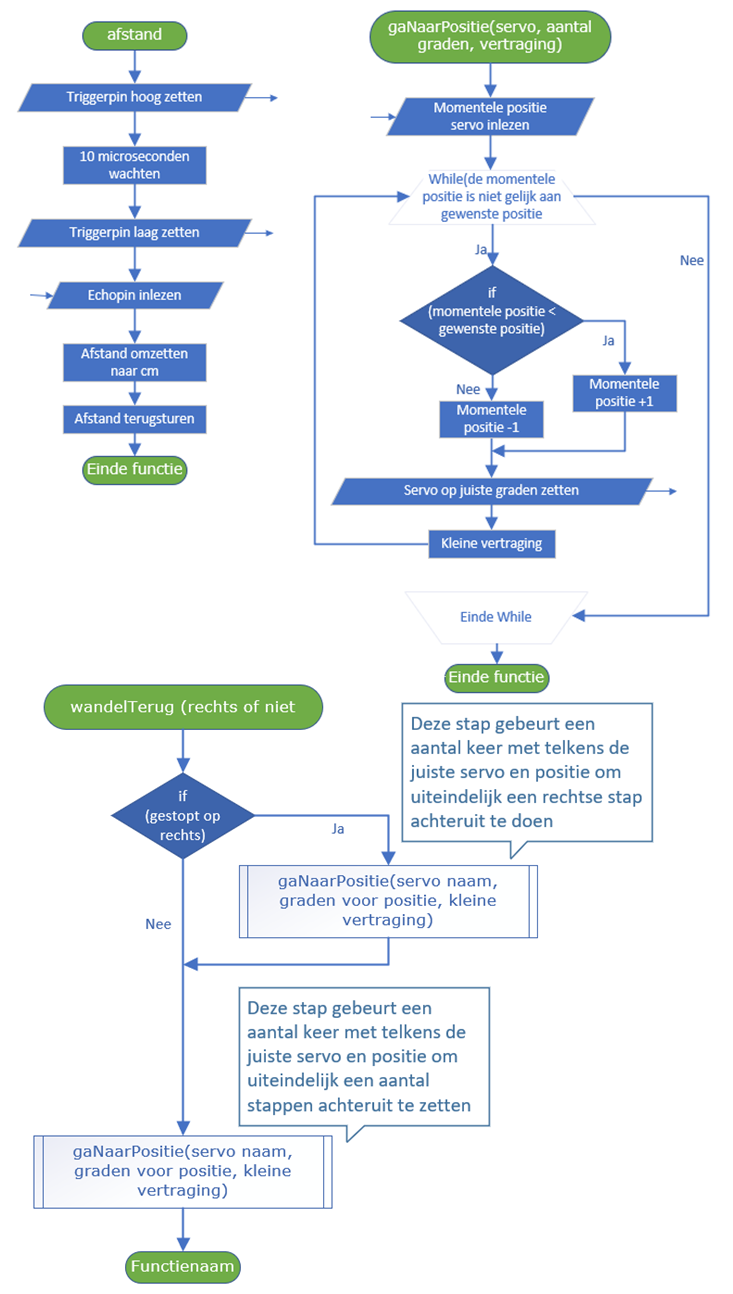
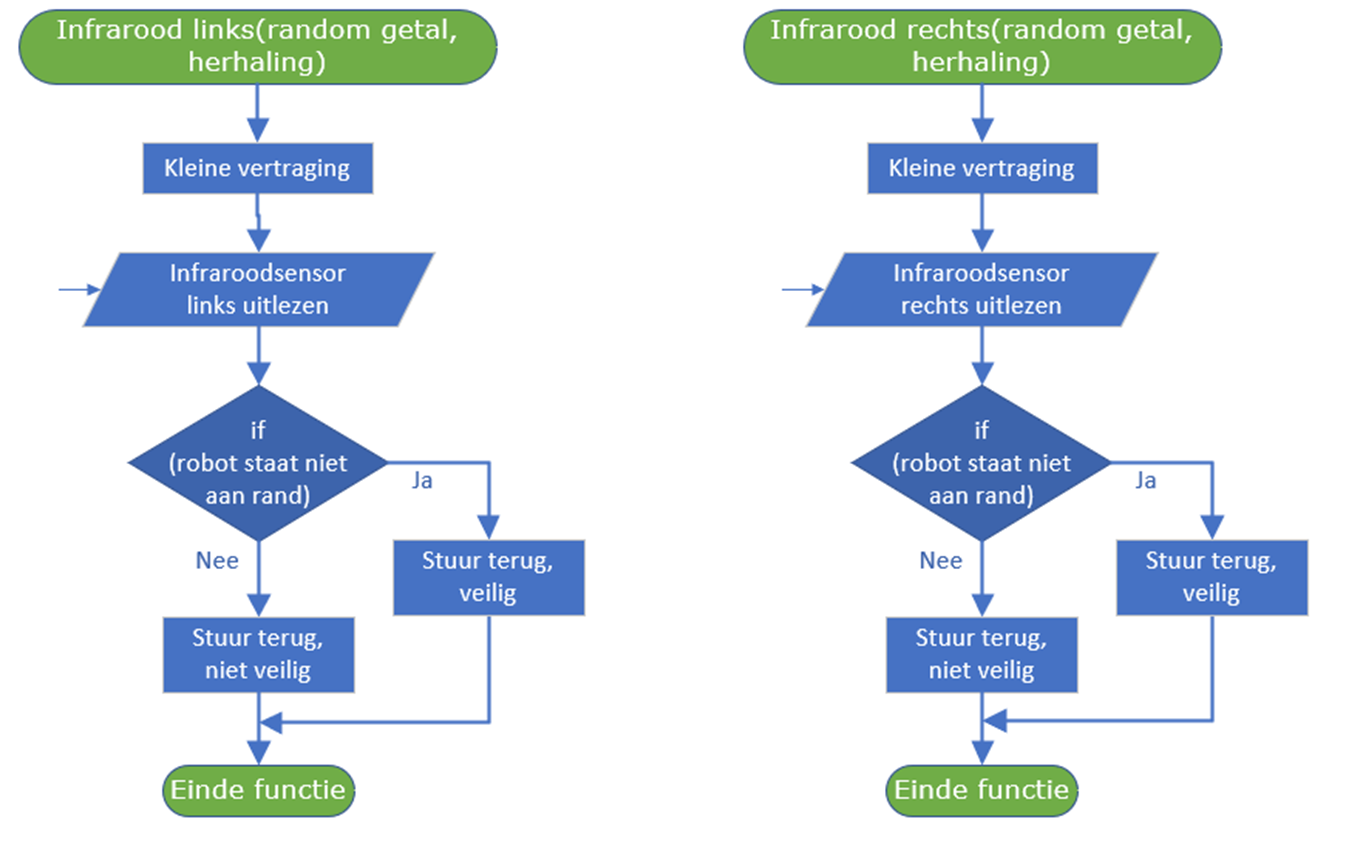
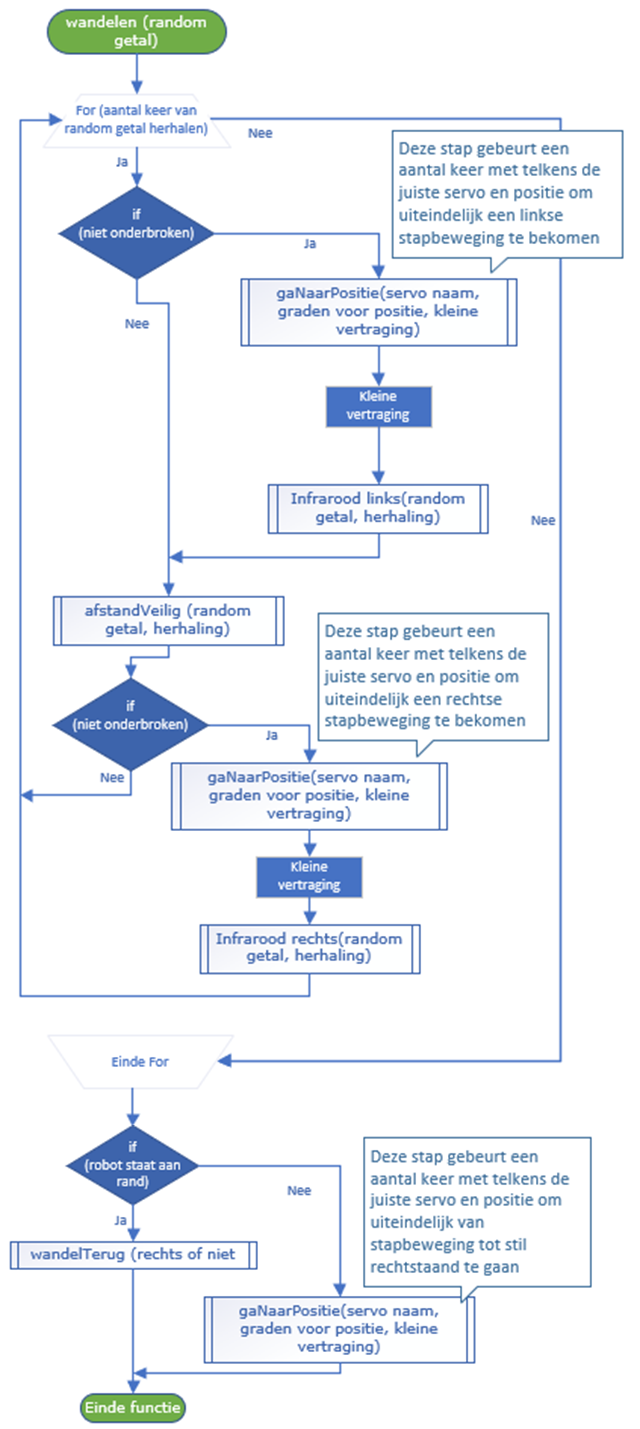
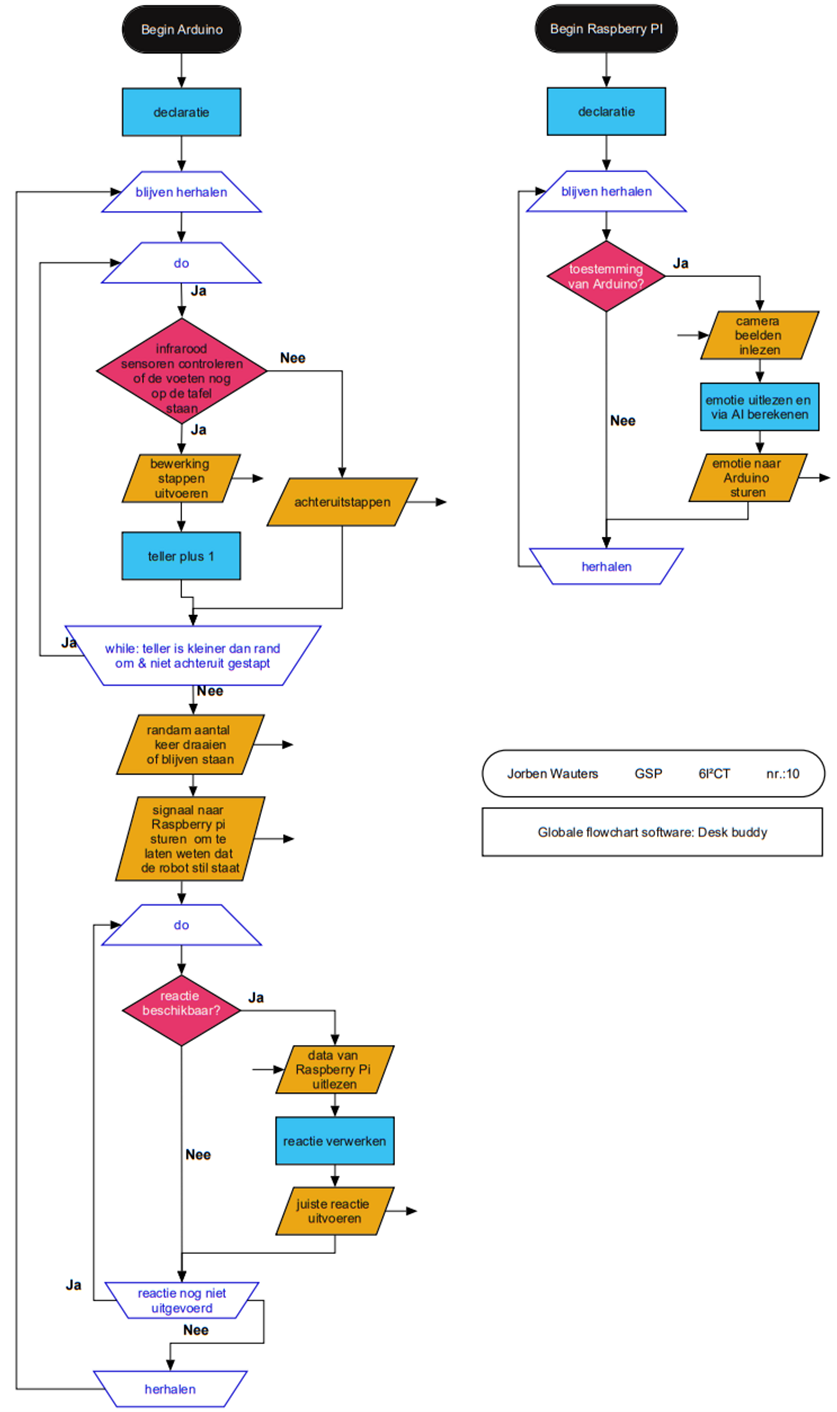
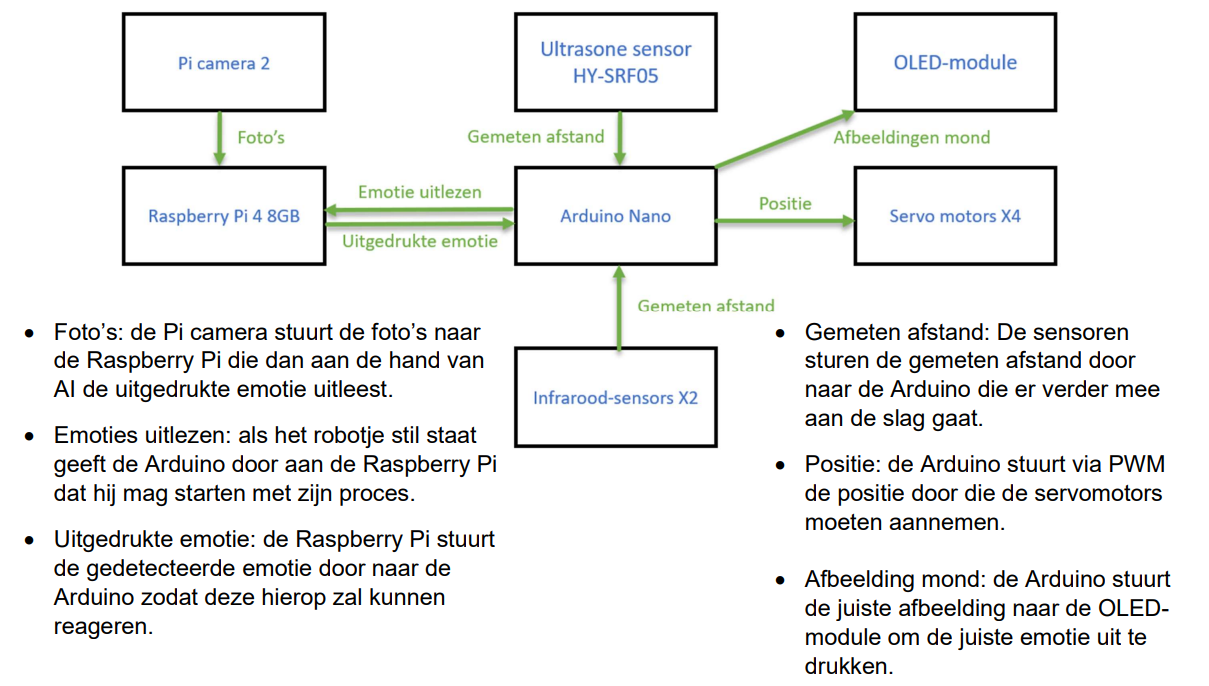
Dit is een globale weergave van de software.
Programma Arduino:
Het programma blijft zich oneindig herhalen. Er zal altijd eerst door de sensoren gekeken worden of het veilig is om te stappen. Vervolgens zet het robotje een willekeurig aantal stappen. Na elke stap wordt er via de infrarood sensoren gecontroleerd of de robot nog niet aan de rand van een tafel staat. Als het robotje wel aan de rand staat zal het naar achter stappen. Vervolgens zal het robotje een willekeurig aantal keer draaien.
Als het robotje tot stilstand is gekomen zal het aan de Raspberry Pi laten weten dat zijn programma mag beginnen werken.
Als de Arduino vervolgens een signaal terugkrijgt met daarin de door de Raspberry Pi uitgelezen emotie, zal het robotje hierop reageren door een uitdrukking weer te geven in de vorm van een mond, en vervolgens weer naar het begin van het programma gaan.
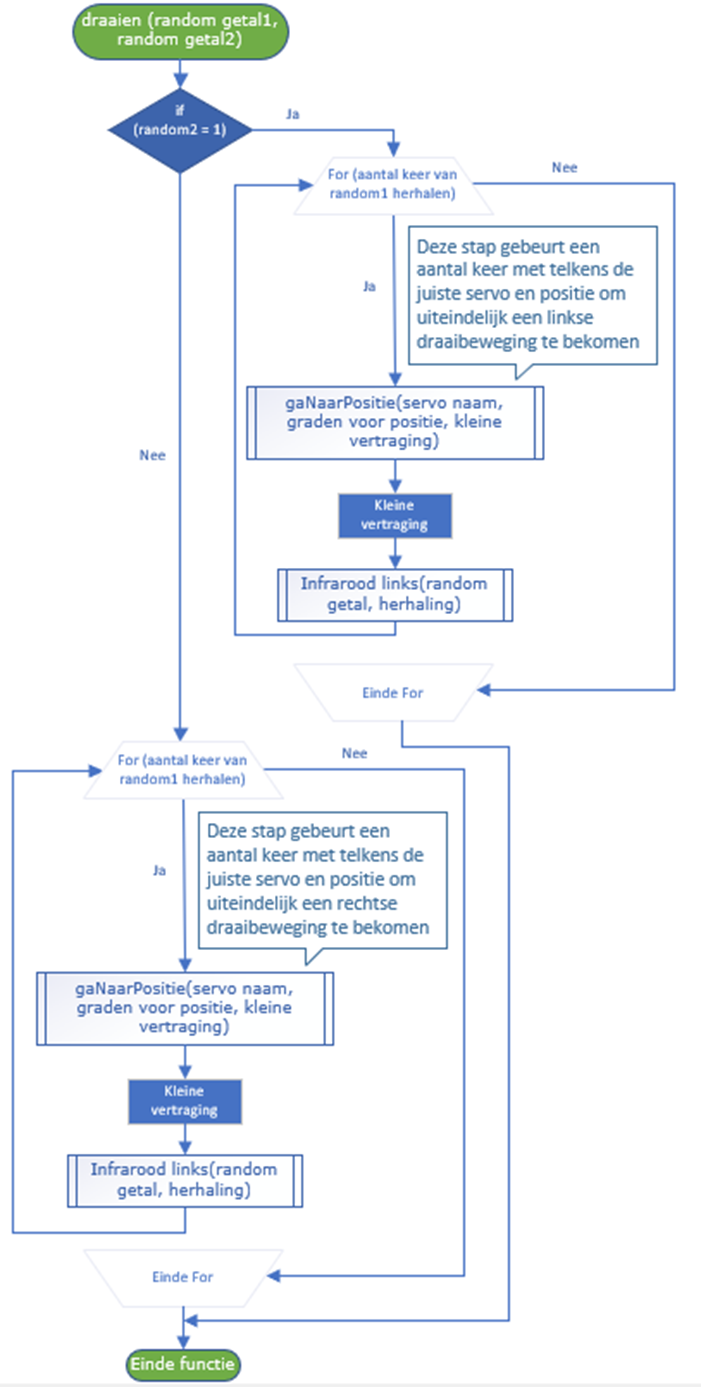
In mijn code gebruik ik veel functies, reden hiervoor zijn:
- Om het overzichtelijk te houden (de meeste stappen hebben hun eigen functie).
- Om ervoor te zorgen dat er niet meerdere keren exact dezelfde code op verschillende plekken staat.
- Het makkelijker is om aanpassingen te doen.
